Chapter 1. 기능적 움직임 체계
-Biomechanics 인체역학
몸의 움직임과 신체 내외부에 작용하는 힘들의 관계에 대한 학문.
관절역학, 인체 내외로 작용하는 힘들, 외부부하, 중력, 모멘트, 지면반발력에 대한 관찰을 기초로 한다. -Kinesiology 신체운동학
근육계 작용에 의한 움직임에 기초한 학문.
근육계의 신체운동학적 활동을 보다 더 잘 적용하기 위해서는 움직임과 관계된 인체역학에 대한 이해가 중요하다.
*특히 사람의 보행주기는 체중의 부하, 비부하 변환 상태가 역학적 사슬 전반에 걸쳐 오케스트라 처럼 일어난다.
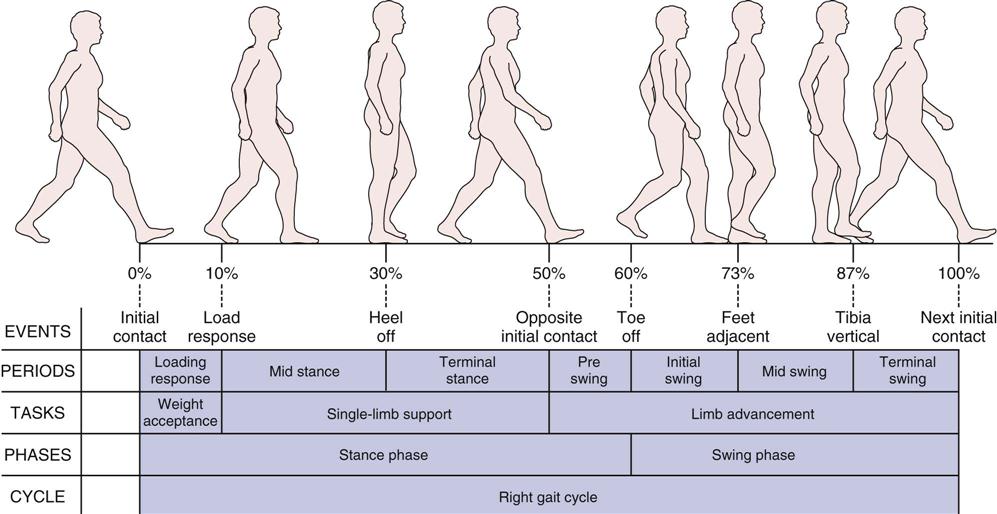
초기 접지기 -> 중간 입각기
하지: 회내 상태, 체중 부하 상태
1. 신체의 전방 모멘트에 대한 감속
2. 지면반발 충격 흡수(체중이 다리에 미치는 충격, 발에서부터 역학사슬을 따라 올라오는 지면 반발에 대한 충격)
-> 하지 역학사슬 근육들 대부분에 원심성 부하가 일어난다.
고관절: 상대적 굴곡, 내전, 내회전
무릎: 굴곡, 외전, 내회전
발목-발 복합체: 배측굴곡, 외전, 외번
*이런 과정을 통해, 신체는 근막시스템의 탄력적이고 수축적인 성질을 이용하여 에너지를 아끼고, 보행주기의 진출기에서 생리적인 효율성을 이끌어낸다.
중간 입각기 -> 말기 입각기
하지: 회외 상태, 체중 비부하 상태
1. 가속 단계로 전환
-> 인체가 앞으로 나아가기 위해, 근막 시스템의 탄력적 성분과 근육의 원심성 수축을 이용한다.
고관절: 신전, 외전, 외회전
무릎: 신전, 내전, 외회전
발목-발 복합체: 족저굴곡, 내전, 내번
@어떤 기능적 움직임 전문가들은 회외적 움직임 또는 체중 부하기에서 공짜로 주어진 움직임이라고 이야기 하지만 잘못된 추측이다.
단지 중력이 몸을 당긴다고해서 이런 움직임이 자연스럽게 나오지는 않기 때문이다.
ex) 허리의 불안정적인 부분으로 인한 고관절 내회전 움직임 상실 -> 오히려 중력과 인체역학적 문제로 인해 즉각적 움직임을 만들어내지 못한다. -> 종종 무릎과 발목 같은 다른 관절들에서 보상을 만들게 된다. (고관절 내회전을 보상하기 위해, 무릎의 과도한 외전, 발의 과도한 회내가 일어난다.)
ex2) Tibialis Anterior 전경골근의 inhibition 억제 -> Extensor Digitorum Longus 장지신근의 과활성화 -> 스쿼트 descending phase 하강기에 발가락이 바닥에서 떨어지는 경우 발생 (전경골근이 무릎을 발쪽으로 당기지 못하게 되며, 장지신근을 과활성화) -> 무릎 통증, 발목 dorsiflexion 배측굴곡 제한 등이 발생
*Extensor Digitorum Longus가 Tibia 정강이뼈(경골)의 외측에 붙어있다보니, 발을 외측으로 들게 되면서 발의 회내 -> Tibia 내회전 유발 -> 고관절 내회전, 내전, 하강 등 유발 -> 고관절과 무릎에 지속적인 스트레스 -> 무릎 통증 유발
-운동학
근육시스템 작용에 기반을 둔 움직임에 대한 학문.
고유수용기와 근막체계를 포함한 근육체계는 통합적이고 효율적인 움직임 발달에 필수적이다.
-고유수용성 감각
인체의 시스템들과 수용기로 부터 제공받는 정보에 기초한, 공간에 대한 인식능력.
(눈과 inner ear 내이에 위치한 전정기관들에서 수집한 정보를 포함)
눈: 외부환경에 대한 예측과 안내를 위해 중요. 제대로 된 반사반응을 통해 두눈의 높이를 수평으로 유지하게 하고, 하지 비대칭, 편평족, 틀어진 골반과 같은 자세를 보상하는 이유가 되기도 한다.
전정기관: 머리의 자세와 움직임, 몸의 자세와 균형에 대한 정보 제공
그외 여러 종류의 수용체: 몸의 자세, 긴장도, rate of changes 변화율, 압력에 관한 정보를 중추신경계에 제공. 특히 ‘기계적 수용기’는 이러한 자극에 특화되어 kinesthesia 운동감각(몸의 움직임에 대한 의식적인 감각에 대한 인식)을 돕는다.
-핵심적 기계적 수용기 3가지
근육은 항상 고유 감각수용기로부터 수집된 정보들에 근거한 신경계의 유도 아래 작용한다.
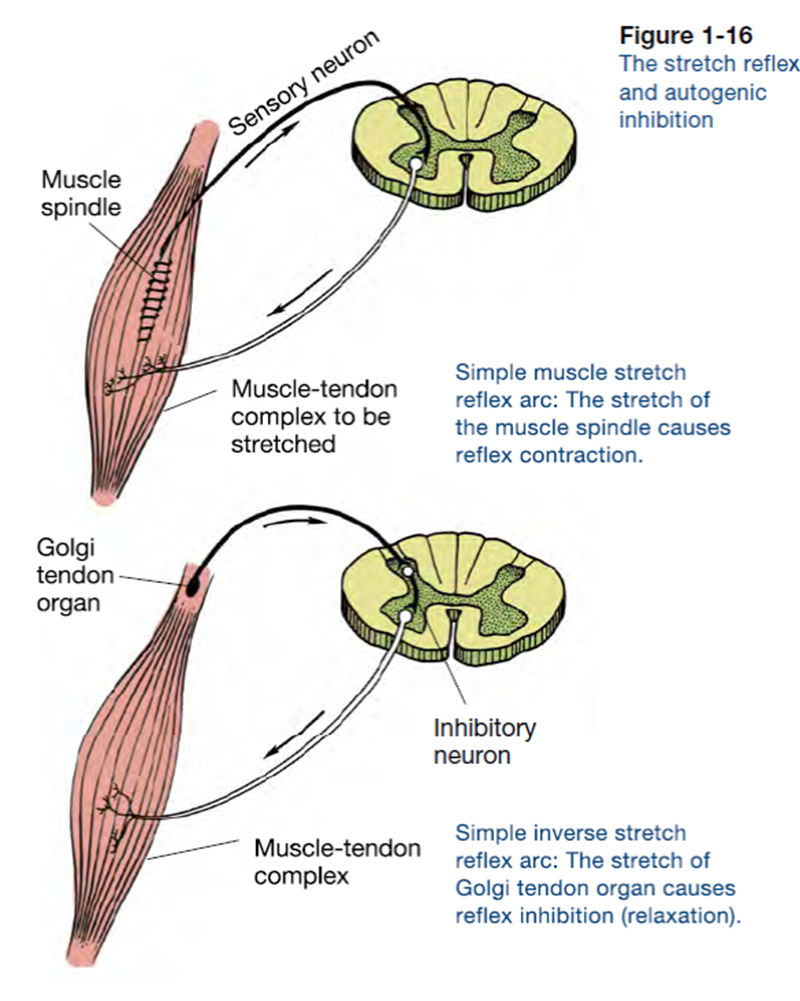
-Muscle spindle 근방추: 근건접합부에 가까운 근복에 위치. 여러 추내 근섬유들이 들어있다.
기능: 지나치게 빨리 혹은 길게 늘어나면, 반사적으로 신호를 보내고, 해당 근육은 스트레칭 반사와 수축을 개시한다.
효과: 근육의 길이와 관절 위치를 유지하여 잠재적 부상의 영향을 최소화.
(상호적 억제반응의 가장 주요한 요소, 근수축이 일어나는 동안 기능적 길항근을 억제하는 작용을 한다.)
*근방추의 작용: myotatic reflex 근신장반사
근방추의 작용이 유발하는 반응.
-Golgi tendon organ 골지건기관: