운동 조절의 과학적 측정
1장에서 다양한 운동조절에 대하여 알아보았으니,
이번에는 다양한 측정법들에 대해서 알아볼 것이다.
인간이 행할 수 있는 무한한 motor를 이해하기 위해 다양한 측정 기술이 이용되어왔다.
이런 측정법들은 motor control의 여러 모형에 대한 타당성을 검사하기 위해 사용되며,
움직이는 동안 직접 중추신경계통 기능을 관찰하거나 기능의 변화를 확인하기 위해 설계되었다.
이 다양한 측정 기술들에 대해, 우선 심리적 측정과 신경학적 측정으로 나누어 이해해보겠다.
심리적 측정방법
심리적 측정방식에는 다양한 방법들이 있다.
초기에는 변수에 대한 기능의 결과나 반응 결과를 관찰하였으나,
후에는 움직임 특정 결과를 이루기 위해 어떻게 조절되는지를 설명하는데 쓰이기도 했다.
simple reaction time, SRT (단순 반응시간)
단순하게 자극에 반응하는 시간을 의미한다.
ex) 총소리에 반응하여 달려나가는 단거리 선수
choice reaction time, CRT (선택 반응시간)
자극에 반응하여 여러가지 선택지중에 반응하는 시간을 의미한다.
ex) 여러명의 팀원들 중에 1명에게 패스하거나 본인이 드리블 해야하는 축구선수
discrimination reaction time, CRT (차별 반응시간)
제시된 여러 신호 중 단 하나의 신호에만 반응하는 시간을 의미한다.
ex) 여러가지 동작(잽, 스트레이트, 로우킥, 하이킥, 태클 등)이 가능하지만, 코치의 주문에 따라 움직이는 격투기 선수
의의: 침습적인 측정 기술에 의존하지 않고,
Hierarchical수직계층 모형과 관련된 특정 예측을 테스트 하는 중요한 수단으로 사용되고 있다.
fractionated reaction time, FRT (분별 반응시간)
반응시간의 각 부분을 분리한 반응시간이라고 생각하면 된다.
sEMG(표면근전도)를 사용하여 두개의 파트(premotortime운동전시간, motor time운동시간)으로 나누어 반응시간을 측정한다.

premotor time, PRMOT (운동전시간)은 위의 그림에서 'Premotor RT'로 표현되어 있다.
PRMOT는 반응신호가 주어진 뒤, EMG의 첫 변화 전까지의 시간을 의미한다.
(*좀 더 간략하게 말하자면, 신호를 받고 몸을 움직이라고 해당 근육에 명령이 전달되기까지의 시간이다.
즉, 감각신호를 받아 해석하고 동작을 계획 후, 해당 근육에 신호가 가기까지의 시간이라고 생각하면 된다.)
motor time, MOT (운동시간)은 위의 그림에서 'motor RT'로 표현되어 있다.
MOT는 근육에 명령이 전달된 후, 움직임이 시작 되기 까지의 시간이다.
(*보통 반응신호이후 실제 움직임까지의 시간에서 PRMOT를 빼서 구한다)
그리고 이 PRMOT와 MOT를 이용하여 우리는 움직임에 있어서 인지과정에 얼마나 시간(PRMOT를 보면 알 수있다)이 걸리는지, 인지과정 이후에 움직임까지 얼마나 걸리는지(MOT를 보면 알 수 있다)를 알 수있고,
이를 통해 어떤 움직임에 있어서 속도와 관련있는 움직임 특성들에 대한 더 자세한 연구가 가능해졌다.
(ex: 움직임의 복잡성, 정확한 요구, 반응하는 팔다리의 해부학적인 특성)
반응시간에 영향을 미치는 변수
위의 사진과 같은 Respone Time,RT 반응시간에 대한 측정연구들은 어떤 변수가 움직임을 계획하고 실행하는데 필요한 시간에 영향을 주는지 알아보기 위해 진행되었고, 다양한 실험으로 인지과정에 필요한 시간에 영향을 미칠 변수들을 확인하였다. (수행자가 선택할 수 있는 변수의 수, 수행에 따른 반응의 복잡성, 움직임에 필요한 정확성, 과제에 따른 연습량 등)
movement time, MT (움직임시간)측정법은 움직임을 시작할 때와 끝났을 때의 시간 간격을 나타낸다.
이것은 motor control의 speed-accuracy trade-off(속도-정확도 교환)현상을 설명하는데 유용하다.

*speed-accuracy trade-off: 움직임의 속도가 올라가면 정확도가 내려가고, 정확도가 올라가면 속도가 내려가듯, 서로 교환되는 현상.
ex: 카레이싱 처럼 빠르게 반응해야하지만 정확도를 요구하는 종목에서, 좋은 코스로 정확하게 갈려고 할수록 정확도에 집중하느라 반응시간(속도)가 느려질 것이고, 속도만 생각하다가는 정확도가 떨어져서 코스를 이탈 할 수도 있다. 이처럼 속도와 정확도는 서로 교환된다.
우리가 앞에서 배운 것을 이용하자면,
어떻게 움직일지 결정하고 명령을 전달하는 시간인 RT(PRMOT+MOT)가 길어질 수록 당연히 더 많은 정보를 통합해서 결정하니 정확도는 높아지지만 대신,
실제로 움직임이 끝날때 까지의 시간 RT+MT의 합은 RT의 값이 상승했으므로 더 값이 상승해버린다(느려진다).
또한 위와 같은 현상뿐 아니라, 특정 움직임에서 그 움직임을 시작하기전에 계획하는지 아니면 움직이는 동안 계획하는지 알 수도 있다.
performance errors (수행 오류) 같은 경우는, 실수에 대한 빠른 검토를 통해 다음 연습 세션에 기초자료로 유용하게 사용된다. 또한 움직임의 목표를 실제 성취했는지 알아보기 위해 서로 다른 유형의 오류 점수를 사용하기도 한다.
(ex: 3점슛을 연습하는 상황이라면, 공이 골대에 들어갔는가?, 3점 라인을 넘지 않는 선에서 최대한 가깝게 있었는가? 등)
그리고 이때 특정 오차 점수를 통해 왜 특정 움직임의 결과가 발생하였는지 더 잘 이해할 수 있다.
그럼 이제 우리에게 유용한 performance errors에 대해 더 자세히 알아보자.
우선 performance errors의 측정은 1차원, 2차원, 연속 움직임으로 나눠 볼 수 있다.
one-dimensional movement(1차원적인 움직임)
absolute error, AE (절대오차)
수행 오류에 대해 총 추정치(gross estimate)를 제공하기 위해 사용한다.
예시: 직선상에 위치한 20m가 목표인 경우, 25m를 움직이면 AE는 5m가 된다.
단점: 기준 목표와 관련한 오류의 크기에 대해 전반적인 추정치는 제공하지만, 오류의 방향에 대한 정보는 제공하지 못한다.
단점의 예시: 15m를 움직여도 AE는 5m가 된다. 이러면 25m나 15m나 같은 AE값이 나오기 때문에, 오차의 양은 파악할 수 있어도, 더 자세한 판단은 불가하다.
constant error, CE (정 오차)
각 시기마다 수행자의 반응과 목표 반응 사이의 대수(algebraic)차이이다. 하나의 반응 시기에 대한 방향성 오류의 양을 정량화하거나 반응 편중 수에 대한 방향성 오류의 평균 양을 정량화하는데 사용할 수 있다. 반응 편중(response bias)을 측정하는데 유용하다.
예시: 직선상에 위치한 20가 목표인 경우, 5회 시도하여 각각 15m,25m,20m,23m,22m를 기록했다면, CE로 나열하자면, -5,+5,0,+3,+2 가 될 것이다. 이를 전부 합하면 +5가 된다.
단점: 개인의 수행력을 평가할 때는 평균 CE가 유용하지만, 집단에 적요할 때 수행력 편중에 대해 다소 부정확한 지표를 제시한다.
단점의 예시: 직선상에 위치한 20가 목표인 경우, 1번 수행자가 25m, 2번 수행자가 15m를 기록한다면, CE가 +5, -5로 합하면 0이 되어버린다. 이런 경우 둘 다 5m정도의 오차가 있었지만 이를 표현하지 못하게 된다.
absolute constant error, |CE| (절대 정 오차)
각 학습자의 시도 횟수에 대한 CE의 절대 값이다. CE의 단점이었던 집단의 평균에 대한 문제를 해결할 수 있다.
예시: 1번 수행자가 25m, 2번 수행자가 15m, 3번 수행자가 10m, 4번 수행자가 22m, 5번 수행자가 28m를 기록했다면, CE로 나열하면, +5,-5,-10,+2,+8 이 되어 평균 CE는 0이 되겠지만, |CE|로 나열하면, 5,5,10,2,8이 되어, 평균|CE|는 6이 된다.
variable error, VE (변수 오차)
수행 오류의 특성에 대해 유용한 정보를 제공해주는 오류점수, 반응 또는 시도 횟수로 나눈 평균에 대한 학습자의 CE점수의 표준편차와 같다.
본인의 평균에 대한 반응의 변화 또는 불일치 등을 정량화하는데 사용된다.
그러므로 VE는 학습자의 반응 평균에 대해 계산하고, 목표 대상 또는 목표 반응에 대해 계산하지 않기 때문에, VE가 좋다고 더 정확한 결과를 보인 것은 아니다.
예시: 직선상에 위치한 20가 목표인 경우, 5회 시도하여 각각 15m,25m,20m,23m,22m를 기록했다면, CE로 나열하자면, -5,+5,0,+3,+2 가 될 것이다. 이 -5,+5,0,+3,+2 들의 표준편차를 구하면 3.8이 VE값이 된다.
(대략, -5,+5,0,+3,+2의 평균을 먼저구한다. -> 평균 1, 앞의 CE값들에서 평균을 뺀다. -> -6, +4, -1, +2, +1
-> 나온 값을 전부 제곱한다 ->제곱한 값 36, 16, 1, 4, 1을 전부 더한다. ->더한 값 58에 (자료수-1)을 나눈다.
-> 58/4 = 14.5. 이게 분산이다. 이제 분산에 루트를 씌워 제곱근을 구하면 표준편차다. -> 약 3.8이 나온다. )
total error, E (총 오차)
오차의 제곱 편균 제곱근(표준오차)와 관련 있으며, VE의 제곱과 CE의 제곱의 합에 제곱근이다.
반응횟수에 대한 목표물에 대한 총 오차를 정량화한다.
반응 편향과 가변성의 용어로 분석할 수 있다
공식: E = 루트(VE제곱+CE제곱)
*너무 수학적 부분에 집중하지말고 일단 대충 각 오차들이 무엇을 측정하고 알아보는데 좋은지 정도만 알고 가면 됩니다!
two-dimensional movement(2차원적인 움직임)
Radial error, RE (반경오차)
2차원 운동과제에서 수행력의 정확성을 평가하기 위해 사용한다.
RE는 수평(x축)과 수직(y축) 양 방향에서 기준 반응과 학습자의 반응간의 거리를 측정하여 매 시도마다 계산한다.
이후 각 값은 제곱하여, x축의 제곱과 y축의 제곱의 합을 더한 후 전체 값을 제곱근하여 계산한다.
예시: 골프나 양궁 처럼 목표지점이 정해진 경우에 목표지점으로 부터의 오차를 구할 수 있게 해준다.

위그림에서,
빨간색점이 목표지점이고, 내 화살이 파란색점에 안착했다면,
RE를 구하기 위해 피타고라스의 정리를 이용하면 된다.
RE는 선분c의 값이므로, x축 값은 선분a, y축 값은 선분b 라는 것을 알 수 있다.
여기서 선분c의 값을 구해야 하므로, a제곱 + b제곱을 해서 c제곱을 구한다음, 제곱근을 하면 c의 값을 구할 수 있다!
root-mean-square error (표준 오차)
연속운동과제(주로 추적과제)의 수행력을 평가하기 위한 측정도구로 사용된다.
(tracking tasks추적과제는 학습자가 입력한 목표에 맞춰 반응하면서 목표물을 계속 따라가는 과제)
여기서는 입력한 목표와 학습자의 반응 사이의 차이가 오류이다!
예시: 운전하기, 직선, 커브, 유턴 등의 길을 경로를 이탈하지 않고 연속적으로 올바른 경로로 움직여야한다.
(이 경우, root-mean-square error표준오차는 정확한 수행력과 길의 이동경로를 나타내는 기준 변이곡선에 대한 운전자의 추적 수행력을 나타내는 곡선 사이 오류의 양을 결정함으로써 계산한다.)
반응과정측정, 과정지향측정기법들.
동작 수행자와 주변 환경 사이의 복합적인 상호작용을 고려한 상황으로 관심이 이동하면서 순간적인 동작 제어를 포착하도록 설계된 측정 기법이 발전하게 되었다. 이런 process-oriented measures과정지향측정은 동작을 더욱 상세하게 설명해줄 뿐 아니라, 계층적 그리고 변혁적 접근법의 유효성을 검증하는 포괄적인 수단을 제공한다.
가장 흔히 쓰이는 다섯가지 측정 기법은 운동형상학 측정, 각도-각도 다이어그램, 위상 도해, 상대 위상, 근전도 검사이다.
운동형상학 측정
수학적 프로그램과 통계적 프로그램등이 보급됨에 따라 연구자들은 다양한 운동기술을 묘사할 수 있는 kinematic운동형상학을 더 객관적으로 정량화할 수 있게 되었다.
Hall(2003)은 kinematic를 "시간을 고려해서 운동의 기하학, 패턴 혹은 형태를 연구한 것" 이라고 정의했다.
양적인 운동형상학 분석은 다른 숙련도를 가지고있는 수행자(숙련자 or 초보자)를 구별해내고 새로운 운동기술을 학습하는 동안 발달하는 움직임 패턴의 시공간적 특성의 변화를 기록하기 위해 사용한다.
그리고 이런 인체동작을 정량화하기 위해 지절 및 관벌의 변위, 속도, 가속도를 이용한다.
변위
움직임 수행시 지절이나 관절의 공간적 위치에 대한 양적 정보를 제공해준다.
변위는 분석대상의 패턴에 따라 직선 혹은 곡선 운동 면으로 정량화할 수 있다.
예시: 미리 선정된 기준점에 밝은 LED나 전자석 마커를 부착하고 고속 촬영 장비와 움직임 분석시스템을 통해 부착한 반사 마커의 위치 변화를 관측
속도
각 관절이 얼마나 빠르게 움직이는가는 같은 동작에서 수집된 변위 자료를 사용해 도출해낼 수 있다.
일정시간 간격으로 측정한 관절의 위치변화를 소요된 시간으로 나누면 된다.
가속도
주어진 시간 간격 동안 속도가 변화하는 비율을 나타낸다.
속도의 변화를 시간의 변화로 나눈 속도 자룔로 도출할 수 있다.
각도-각도 다이어그램 (angle-angle diagram, A-A diagram)
지절 사이의 곡선 변위를 잘 나타낼 수 있다.
움직임 패턴의 변화에 따라 운동의 양적인 부분(관절가동범위)과 질적인 부분(변위의 추세)을 바로 나타낼 수 있다.

위 그림과 같이 관절 각도의 관계변화를 알기 유용하며, 나타내는 모양의 비교를 통해 숙련자와 비숙련자의 차이를 쉽게 표현하거나, 더 나은 움직임을 위한 방향설정을 도와줄 수있다.
예시: 치료사가 환자의 움직임패턴을 diagram으로 확인하고 더 나은 움직임 패턴을 꾀할 수 있다.
코치가 선수들의 사소한 문제를 교정하거나 움직임패턴을 바꾸는데 이용한다.
위상도해 (phase portraits)
움직임 어떻게 조절되는지 기록하기 위한 위상 기하학 도해이며, 관련된 두 개의 운동형상학 수치 관계를 계속 좌표로 나타낸 움직임의 기하학적 그림이다.
지절의 속도 변화가 관절 위치에 미치는 영향, 신경근육계통의 안정성을 알아보는 질 평가 등에 사용된다.

A-A diagram이 두 관절의 협응의 특징을 표현한다면,
phase portrait는 특절한 관절이 움직임 안에서 어떻게 조절되는지 표현한다.
*한마디로, A-A diagram은 두 관절의 각도가 어떻게 동시에 진행되는지 보여준다면,
phase portrait는 한 관절의 각도와 변수(속도,가속도 등)를 보여준다고 생각하면 될 것 같다.
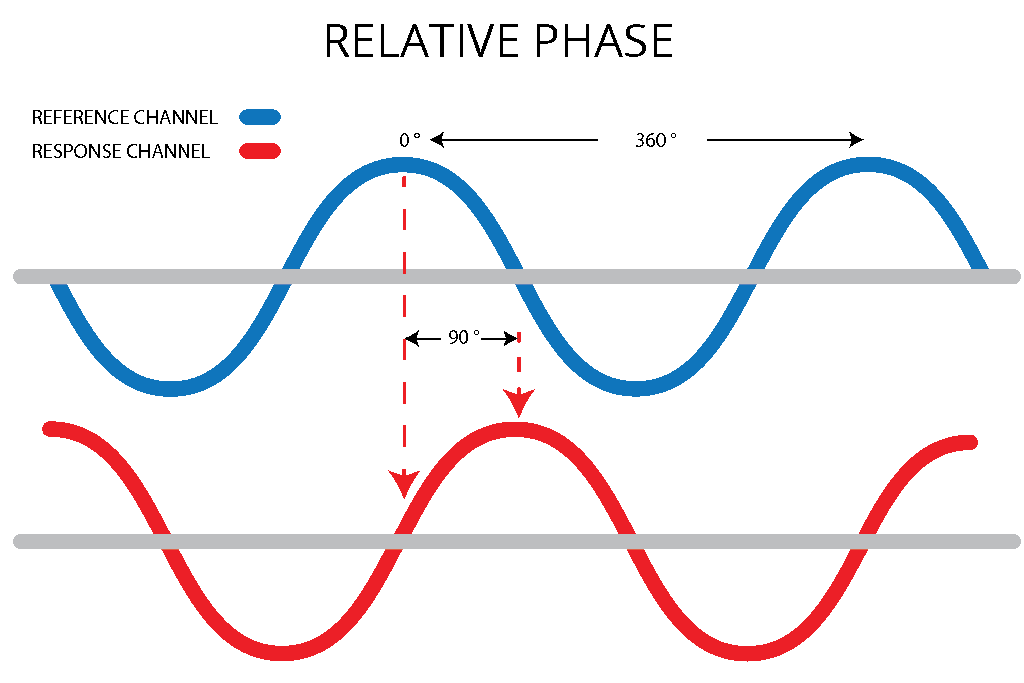
상대적 위상화 (relative phasing)
역학 이론가들이 상이한 운동기술을 배우고 수행하는 동안 지절이 어떻게 협응하는지를 검사하기 위하여 자주 사용하는 측정방법이다.
이런 상대적 위상값 측정을 통해, 두 개의 움직이는 부분이 동위상에 있는지(동일한 방향으로 움직이는지), 아니면 역위상에 있는지(반대 방향으로 움직이는지) 알아 볼 수 있다.
다양한 움직임을 수행하고 학습할 때 일어나는 신경근육계통의 협응과 조절을 연구하기 위해 많이 사용되었다.
*아직은 우리가 실제로 이런 방법들을 활용하여, 연구를 할 것이 아니기 때문에 일단은 이런 것들이 있다 정도만 이해하시면 됩니다!
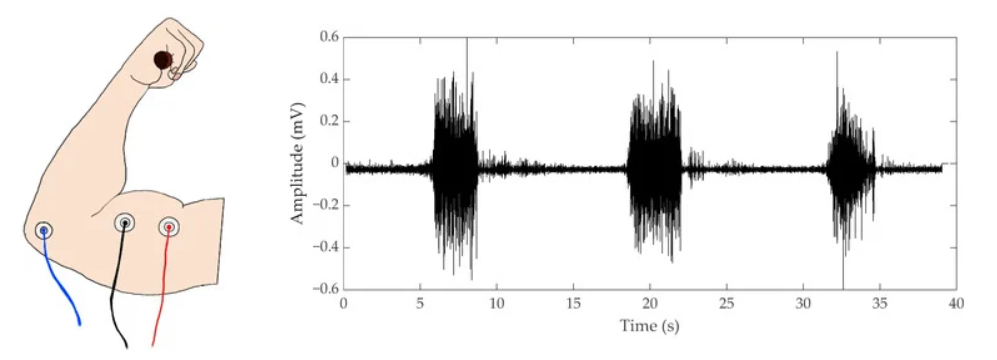
근전도 검사법 (electromyography, EMG)
해당 부위의 피부표면에 전극을 부착하여, 작용근과 대항근에서 발생하는 전기적 활동을 측정하는 방법이다.
움직임의 공간적, 시간적 특성을 확인할 수 있다. 또한 EMG파장의 형태로 가해진 힘의 양, 진폭, 수축기간 등도 알 수 있다.
*우리가 흔히 과학적으로 움직임을 분석한다고 상상할 때 생각하는 그 방식이다.
근육들에 전극을 붙이고 측정하는!
신경학적 측정
기록기술과 계측장비의 발달로 신경계통의 내적 작용에 관하여 알 수 있게 되었다.
이런 기술은 운동조절이론을 신경학 수준의 분석에서 연구할 수 있게 해주었다.
크게는 invasive(침습)과 noninvasive(비침습)으로 구분된다. (침습은 몸에 칼을 대서 몸속에 무언가를 제거하거나 설치하는 등의 방법을 말합니다! 비침습은 그러지않고 피부에 부착하거나, 광선을 쏘고나 하는, 몸에 칼을 대지 않는 것이라고 생각하시면 됩니다!)
invasive기술에는 세포내 기록 방법, 병소와 제거 등이 있고, noninvasive기술에는 양전자 방출 단층 촬영술, 기능적 자기 공명영상, 경두개 자기 자극술 등이 있다.
intracellular recordings (세포 내 기록기법)
마이크로피펫을 뇌에 삽입하여 움직이는 동안 나타나는 세포 내 잠재력을 기록하는데 사용된다.
위험도로 인하여, 동물 연구에만 제한되어 있지만, 움직임의 계획과 실행 부분에서 특정한 신경학 구조의 법칙을 더 잘 이해할 수 있도록 도왔다.
ablation and lesions (제거와 병변)
중추신경계의 특정구조를 일부러 ablation제거하거나 lesions병변을 일으키는 방법이다.
관심부위를 제거하거나 병변을 일으킨 후, 새로운 움직임에 대한 조절능력이나 학습능력에 대해 면밀히 조사한다.
해당 중추신경계가 무엇을 담당하고 있었는지, 그리고 후에 해당 부위에 대한 대처를 중추신경계에서 어떻게 해내는지 등을 알 수 있도록 도왔다.
이또한 동물에게만 제한적으로 사용되며, 인간의 신경계통 기능으로 적용할 때는 주의해야 한다.
positron emission tomography, PET (양전자 방출 단층 촬영술)
PET는 체내에서 일어나는 생화학적 변화를 평가할 수 있으며, 역동적인 뇌 기능을 연구하는데도 사용된다.
특정 약물이 몸속으로 퍼져서 분포하게 되면, 그것을 모니터링 할 수 있어서,
서로 다른 신경학 질환의 질병 과정을 이해할 수 있을 뿐만 아니라 약물연구 및 발달에 광범위하게 쓰이고 있다.

functional magnetic resonance imaging, fMRI (기능적 자기 공명 영상)
fMRI는 뇌 영역의 화학적 화합물 또는 뇌척수액이나 혈액과 같은 액체 흐름의 변화로 인한 뇌기능의 변화를 시각화해준다.
운동기술의 학습과 기억에 관련된 신경구조나 뇌영역을 발견하는데 사용된다.
PET보다 시간적 공간적 해상도가 좋기 때문에, PET와 함께 또는 대신 쓰인다.
또한, 매우 빠르면서 연속적으로 뇌 이미지를 만들 수 있어, 획득된 뇌 이미지 간에 차이점이 존재한다면 이미지를 통계학적으로 분석할 수 있다.

transcranial magnetic stimulation, TMS (경두개 자기 자극술)
큰 자기적 진동을 만들어내는 소형 장치로 구성된 대뇌 겉질 자기 자극기를 사용하며, 이 자기적 진동은 소형 장치에 연결된 주요 자극기에 의해 전달된다.(그림 참조)
TMS는 신경활동 능력에 영향을 미치는 특정 신경학 질환 한자들의 일차 운동신경로의 기능 장애 수준을 확인할 수 있게 도와주며, 신경학적 외상 유형에 따른 운동회복 정도를 예측할 수 있는 수단이 된다.

*나의 생각
운동조절로 인하여 일어나는 움직임에 대한 다양한 측정요소들과 그 방법에 대해서 알아 볼 수 있었다.
여기서 배운 측정요소들 중 몇가지는 실제 스포츠 선수들의 퍼포먼스에 대한 교정점을 찾거나, 재활 하는 경우에 이전에 비해 훨씬 더 과학적으로 처리하며 고찰할 수 있게 도와줄 것이라고 생각한다.
물론 뒤에 나올 단원들에서 더 자세한 운동학습 방법들에 대해 나오겠지만, 우선 여기 나온 측정요소들만 해도 이전보다 훨씬 나은 분석이 가능해질 것이다.
활용되지 않는 것은 잊혀진다고 생각한다. 잊혀지지 않기 위해 우선은 배운 선에서 활용해보면 좋을 것 같다.
'🤸Motor of human > Motor control and Learning' 카테고리의 다른 글
| 3. 동작을 위한 몸감각계통의 역할 (0) | 2022.05.04 |
|---|---|
| 1. 운동조절의 소개 (0) | 2022.04.17 |